鉄道総研、自律型列車運行制御システム開発 車上のみで停止・運転再開判断
会員限定記事
2025/5/16(金)
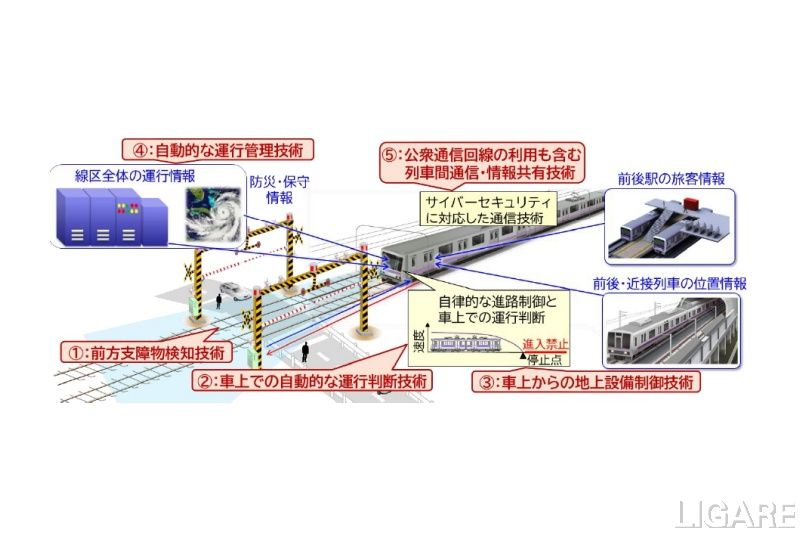
自律型列車運行制御システムを構成する
5つの要素技術
鉄道総合技術研究所(以下、鉄道総研)は5月13日、列車自らが車上に集約した運行に関わる情報に基づき、進路上の安全を判断し、踏切などを制御しつつ安全かつ柔軟な運行を実現する「自律型列車運行制御システム」開発を発表した。地上の信号設備によらず、車上のみで列車停止から運転再開判断までの自動化は世界初となる技術だという。
同システムは、「前方支障物検知技術」、「車上で自動的に運行判断をする技術」、「車上から地上の転てつ機や踏切を直接制御する技術」、「運行管理を自動的に行う技術」、「列車間通信・情報共有技術」によって構成されている。
同システムのプロトタイプの実証試験では、設定した運転パター...