
連載企画 日本総合研究所 地域社会の「新しい足」 自動走行移動サービスの創出(後編) 自動運転による「コミュニティサポート・モビリティ・サービス」の実現を目指して
2017/5/6(土)

地域コミュニティをサポートするモビリティサービス
前々号、前号では、2016年10月に神戸市北区筑紫が丘で行った、低速モビリティによる近距離圏内移動サービスのサービス実証について、利用状況や利用者からの期待の声、そしてサービス実証の主体となった地元交通事業者が実際に得られた手応えをご紹介しました。
日常生活を支える移動サービスとして、特に高齢化が進む数年後への期待が高かったこと、そしてカメラを備えたモビリティが走り回ることによる防犯効果や乗り合いの際に地域住民同士が顔を合わせコミュニケーションが活発化した事例など、移動以外の価値にも注目が集まりました。
日本総研では、自動運転を活用した低速モビリティによる近距離圏内移動サービスが、住民と地域コミュニティに活力をもたらす、欠かせないインフラに成長するものと考えています。本号では、このサービスを「コミュニティサポート・モビリティ・サービス」と定義し、そのあらましとサービスの社会実装の早期実現に向けた道筋について言及します。
コミュニティサポート・モビリティ・サービスの内容
コミュニティサポート・モビリティ・サービスは、近距離圏内移動サービスを核に、住民と自治体、商店街間でのコミュニケーションを活発化させ、地域コミュニティの活性化を図るものです。ここではその特徴と目的を記します。
近距離圏内移動サービス
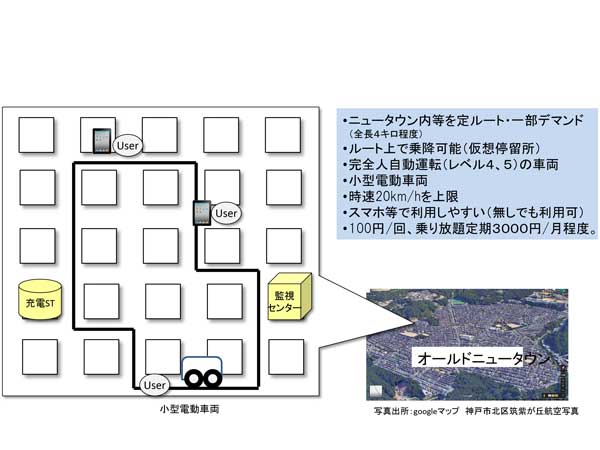
【低速】
車両は低速(上限20km/h)で運行される前提です。安全面での確認はとったとしても自動運転技術は発展途上といわざるを得ず、万が一の事故の際にも大きな事故にはなりにくい低速走行での運行が特に初期には求められるからです。また、近距離圏内での移動サービスであれば、低速でも用途としては十分であるうえ、住宅地でも騒音問題等を引き起こしにくくなります。
【定ルート、デマンド】
車両を呼び寄せ、目的地に直接向かえるデマンド運行は利便性が高く一定の需要が見込めますが、神戸でのサービス実証では車両を呼び寄せる手間のない定ルート運行の方が利用者数で上回りました。
山手線のように気軽に利用でき、多くの利用が見込める定ルート運行の基盤を構築したうえで、メジャーではない地点間でも移動できるデマンド運行が補完する形で一体的に提供することが妥当と言えます。
【電動かつ小型車両】
電動車両を用いるのは、住宅地にはガソリンスタンドがないことが多いため、そしてガソリンより電気の方がコミュニティ内ではエネルギー補給の効率が良いためです。
また、排ガスが出ず、騒音も少ないため住民の生活環境への影響を抑えることも電動車両を活用するメリットです。小型車両が好ましいのは、コミュニティ内は高齢者や子供なども含めた歩行者や、一般車両などの移動があるため、圧迫感を与えないことへの配慮です。
【利用者にIT機器の活用を押し付けないサービス】
利用者がIT機器を通じて車両の現在位置を知ったり、車両を呼び寄せたりできるようにすることは非常に重要です。
しかし、近距離圏内移動サービスの主要なユーザーは高齢者や専業主婦層であり、一般にIT機器への習熟度は高くありません。彼らが組織する自治会の協力を快く得るためにも、電話などによる対応も含め、利用者にIT機器以外からのアクセスができる仕組みが必要です。
【自動運転車両の活用】
交通事業におけるコストの大半は運転手の人件費が占めています。近距離圏内移動サービスは、特にデマンド運行では運転手の人件費が加算されると採算が合いにくく、定ルート運行では「歩いても行ける」距離でも乗車してもらえるように頻繁な運行、つまり多くの運転手が求められます。そのため、運転手に頼らない自動運転車両の活用が必要となります。
コミュニティサポート・モビリティ・サービスのイメージ
サービスを支える形
【既存交通との連携】
近距離圏内移動サービスは、生活圏内での移動を容易にするだけでなく、既存の中長距離交通サービスとの連携によって、マイカーに頼らず、どこにでも公共交通で行くことができる交通ネットワークを構築することも大きな目的としています。
既存の交通サービス側から見れば、近距離圏内交通サービスは「ラストワンマイル自動運転サービス」として位置づけられる存在となります。
【(店舗や商店、イベントへの)集客効果】
コミュニティ内の店舗によるタイムセールなどの情報を、定ルート運行車内広告で流し途中下車での買い物を誘導できたり、利用者のIT機器に送信してそのままデマンド配車の予約ができたりすれば、利用者のメリットになるうえ、店舗からの広告収入も得られます。
【住民利用】
自宅から出て最初に乗車し、近所であればどこにでも気軽に行くことができる近距離圏内交通においては、利用客の多くは都度払いから定期利用に移行していくことが予想されます。実証での利用者アンケートを参考にすると、一人当たり月額3000円までの定期利用は期待できます。
【防犯効果】
車両には内外にカメラを設置します。車内での状況把握とドライブレコーダーとしての活用が主な目的ですが、副次的な効果として「走る防犯カメラ」としての役割も担えます。
自治会にとっては、地域防犯活動はコミュニティを維持するための重要な活動となり、行政の支援を受けながらこの「走る防犯カメラ」を採用することも考えられます。
社会実装に向けた道筋
コミュニティサポート・モビリティ・サービスの社会実装には、実現の課題を明らかにし、その課題一つ一つを解決するようなサービス実証を繰り返すことが重要となります。
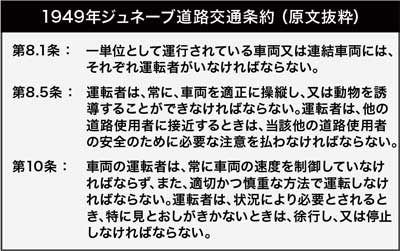
課題としては、まず規制面があります。ジュネーブ条約やウイーン条約などの国際条約では、公道でのドライバー不在による自動運転車両の走行が禁止されています。改正についての見通しはまだ立っていませんが、欧州を中心に改正を働きかける動きは見られます。
よって、国際条約が改正され、無人での自動運転車両の走行が解禁されたときに、速やかに無人でのサービスが開始できるよう、有人によるサービスを先行的に開始し、知見を蓄積しておくのが有効と考えます。
ジュネーブ条約の道路交通に関する事項
ドライバーの配置が必要となると、コスト面と人材不足面の課題に直面します。交通サービスのドライバー人件費の高さや人材不足の要因は、二種運転免許保有者に限定されているからです。
一つの突破口として期待したいのが、規制緩和です。低速で安全な運行が認められる車両と認められる場合に限って、普通免許保有者でも、交通サービスを実施することを許されるよう、国内法規の解釈がなされたり、一部改正されたりすることです。
技術面での課題としては、自動運転(レベル4の技術)による走行がサービスを提供する上で十分か検証する必要があります。現在、企業や大学などが用意している様々な自動運転車両も、まだ限定エリアの自動運転(レベル4)の交通サービスに耐え得る技術を有しているのかは未知数です。実際のサービス環境における実証を重ねながら、安全性を確保していく必要があります。
リスク面での課題もあります。技術的に未知数な自動運転は、事故などのリスクがどのような範囲まで及ぶのかが不明です。よって、保険が高額になってしまう可能性があります。このリスクコストを誰の責任でどの程度見込むべきかを明確にしならなければなりません。
最後に、サービスを成り立たせるための事業採算面の課題があります。ニーズがあっても、提供するサービスのイニシャルやランニングコストが高額になってしまっては、コミュニティという一つのサービス先としては小規模で成り立ちません。コミュニティの身の丈にあったコストで提供できるよう、技術面でも運用面でも先進性より確実性と効率性を優先する配慮が必要となります。
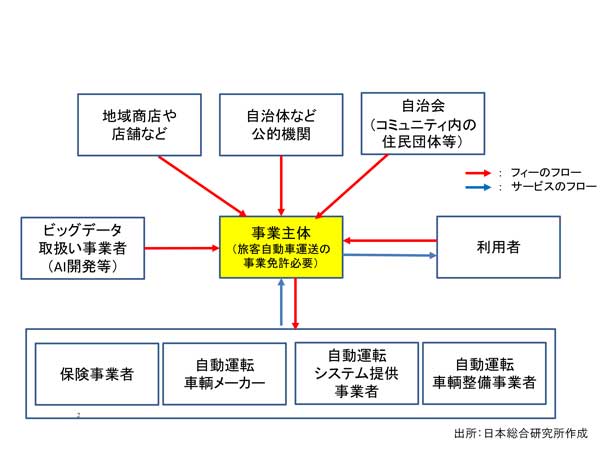
また、コミュニティを構成するのは住民だけでなく、移動先となる店舗や商店、そして住民が活動的な生活をすることによって受益者となり得る地域の自治体や開発事業者まで広がります。これらのコミュニティの受益者が参加し、サービスを支えられる仕組みを構築していくことが重要です。
その他、大手企業へのデータ提供も事業の一つとして検討するべきです。自動運転を活用したサービスで得られる画像をはじめとする大量のデータは、人工知能(AI)の開発やマーケティングに活かしたい企業にとって非常に魅力的です。彼らへのデータ提供による収益が獲得できれば事業としてより安定が見込めます。
グローバル企業とコミュニティで支えあう事業スキームのイメージ
コミュニティサポート・モビリティ・サービスの実現までには、表のようなステップを踏んだ展開を想定しています。
ステップ1はコミュニティサポート・モビリティ・サービスにおけるニーズの確認です。我々が今回実施した実証があてはまります。
ステップ2は、レベル4の自動運転を用いて、ドライバーが乗車した形でのサービス実証です。国内法規を考えると、利用者からの料金は徴収しません。このとき、実証で得られるデータは、自動運転のサービス化に関連する規制緩和を検討している国の機関や、保険商品を考える企業にとっては、課題解決につながる重要な情報となります。
また、事業モデルの課題として、必要コストの最小化の検討と、関係受益者にサービスを支える側の価値を認識してもらうことも重要です。
ステップ3は、ステップ2のモデルをベースに、利用者から料金を徴収してサービスの提供を開始するものです。ただし規制を緩和し、二種免許のないドライバーでも有料によるサービス提供が可能となっていることが条件となります。
ステップ4は、ドライバー不在でのサービス提供です。前述のとおり、国際条約の動向に左右されますので、国内では当面ステップ3までの実施を目指すことになります。
以上の課題に対応する形で、我々は実証を繰り返しながら早期の社会実装を推進していく考えです。まずはステップ2の段階を、2017年度中に実証し本誌でも経過を発信していくので、ご注目いただければ幸いです。

自動運転を活用したコミュニティサポート・モビリティ・サービスの社会実装へのステップ
著者紹介
日本総合研究所 創発戦略センター マネジャー 武藤一浩 氏







