
NTT、デジタルツインを活用した信号機不要の全体最適制御技術確立
会員限定記事
2022/6/3(金)
日本電信電話株式会社(以下、NTT)は、信号機を使わないモビリティ実現に向けた全体最適制御のための技術を確立した。5月30日付のプレスリリースで明かしている。
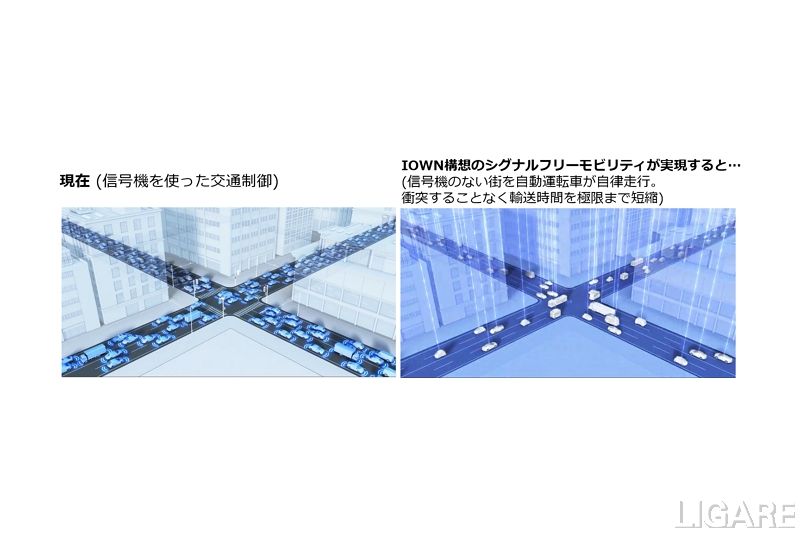
将来、ICTの高度化により、ヒト・クルマ・インフラが高度に協調し、安全かつ効率的な移動を提供する高度協調型モビリティ社会の実現が期待されている。IOWN構想※のシグナルフリーモビリティが実現すると、信号機のない街を自動運転車群が相互に通信をしながら自律走行し、衝突することなく輸送時間を短縮することが可能だ。
※アイオン:Innovative Optical and Wireless Network(NTT Webサイトより)
...









