
自動運転への活用も提案 産総研、位置姿勢推定システム「L-C*」開発
会員限定記事
2023/6/1(木)
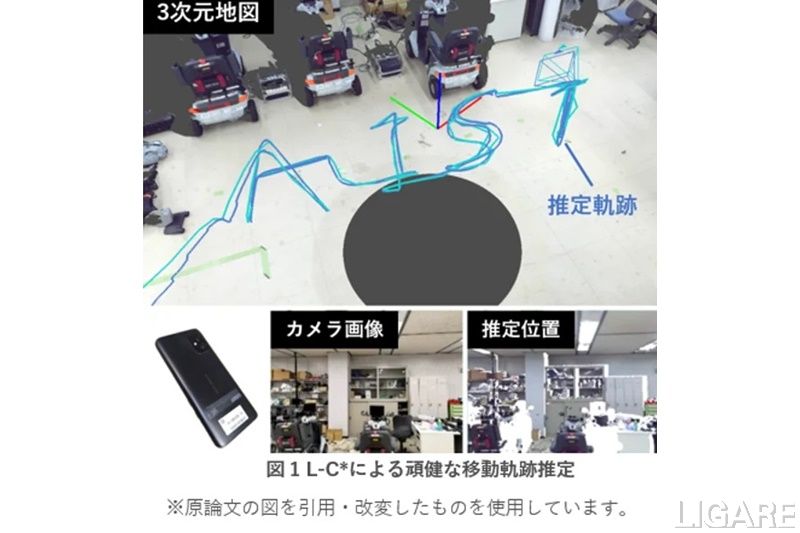
国立研究開発法人 産業技術総合研究所(以下、産総研)デジタルアーキテクチャ研究センター スマートモビリティ研究チーム 大石 修士 主任研究員らは、位置姿勢推定システム L-C*(エル シースター)を開発した。
同システムは、地図とカメラ画像の照合による位置姿勢の推定と、照合間の動きを補間するセンサー運動の推定を統合したものだ。これにより、安定して、かつ少ない計算量でカメラの位置姿勢を実現している。同技術の詳細は、2023年5月29日から6月2日まで英国・ロンドンで開催される国際会議IEEE International Conference on Robotics and Automa...









