
市街地用無人移動システムに求められる技術と可能性 LIGARE ビジネスセミナー
会員限定記事
2017/11/16(木)
無人移動システムに求められる技術要件
当然ながら、認知・判断・操作という人の機能が、無人移動システムの技術要件として求められます。センシング、制御(操舵系、速度系)などの機能のことです。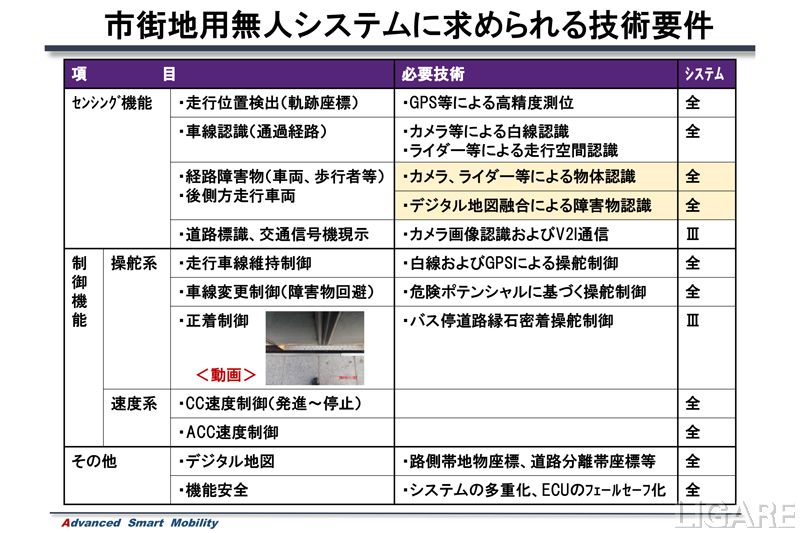
市街地用無人移動システムに求められる技術要件
通常、自動運転をする場合には、出発地から目的地まで走行する軌跡をコンピューターに入力する必要があります。その場合、地球座標系を用いるので、自分がどこにいるのかを高精度に測る必要があります。現在はGPS...


関連記事:



get_the_ID : 2132
has_post_thumbnail(get_the_ID()) : 1
has_post_thumbnail(get_the_ID()) : 1



自動運転特集
