
清水建設、複数ロボットのエレベーター同乗技術確立 自社ビルで実装
会員限定記事
2023/7/21(金)
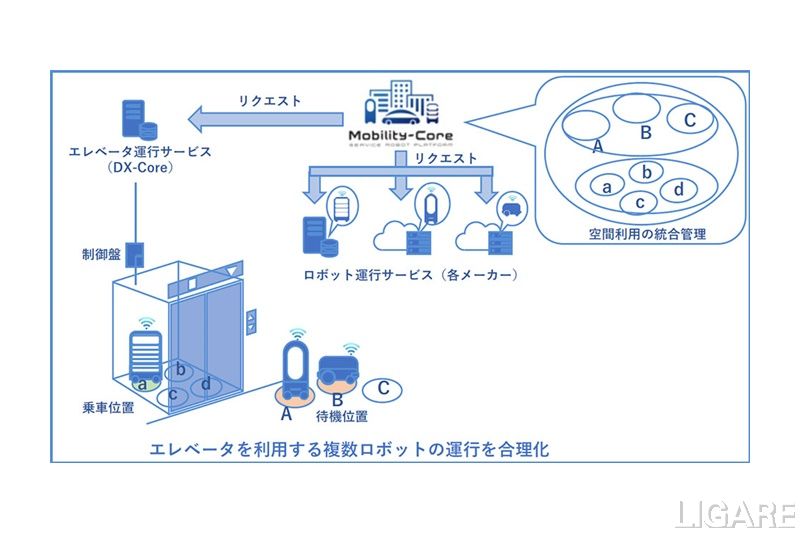
複数ロボットの
エレベータ同乗技術
イメージ
清水建設株式会社(以下、清水建設)は7月20日、施設内で稼働する複数のサービスロボットがエレベーターを共用しながらそれぞれの目的階まで円滑に移動するエレベーター同乗技術確立を発表した。自社運営のオフィスビルのメブクス豊洲で実装するという。
同技術は、自社開発した複数ロボット・モビリティの統合制御システム「Mobility-Core」を利用したものだ。ホールでの待機位置や、かご内の乗車位置、乗降の順番など、エレベーター内外におけるロボットの空間利用を統合的に管理することで、ロボット同士の干渉による走行不全や膠着を回避し、タイムロスの少ない効率的なサービスロボットの運用を実現する。
メ...









