
高精度地図から自動運転に適した道を判断 トムトムが来年アメリカで展開
法人プレミアム会員限定記事
2020/9/8(火)
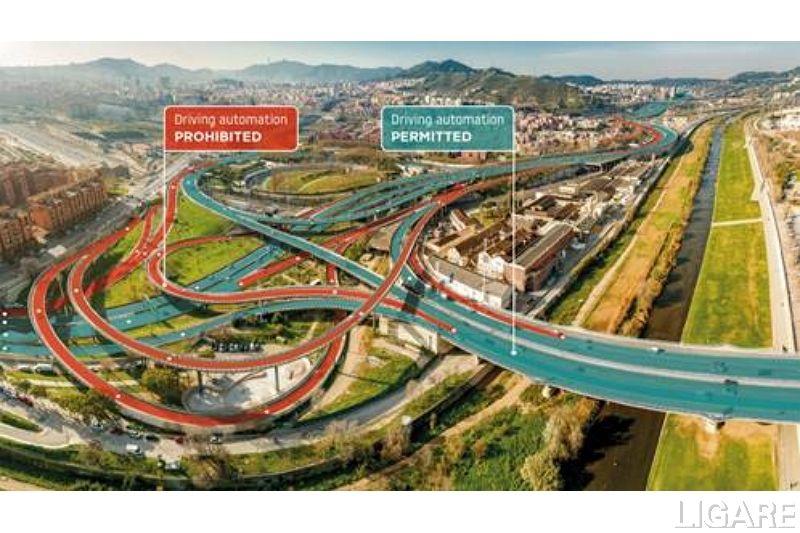
RoadCheckを使用して自動運転実行可能な道路を特定した図
オランダのロケーション・テクノロジー企業TomTom(トムトム)が7日、自動運転に適した場所を判断する「TomTom RoadCheck(トムトム・ロードチェック)」を発表した。
※このコンテンツはLIGAREオンライン法人プレミアム会員限定公開です。会員の場合はログインしてください。
無料会員および有効期限切れの場合は以下のページから法人プレミアム会員にお申し込みください。
無料会員および有効期限切れの場合は以下のページから法人プレミアム会員にお申し込みください。










