
ヴァレオ、HDマップ大手のDMPと協業 自動運転システム開発を加速
会員限定記事
2021/2/26(金)
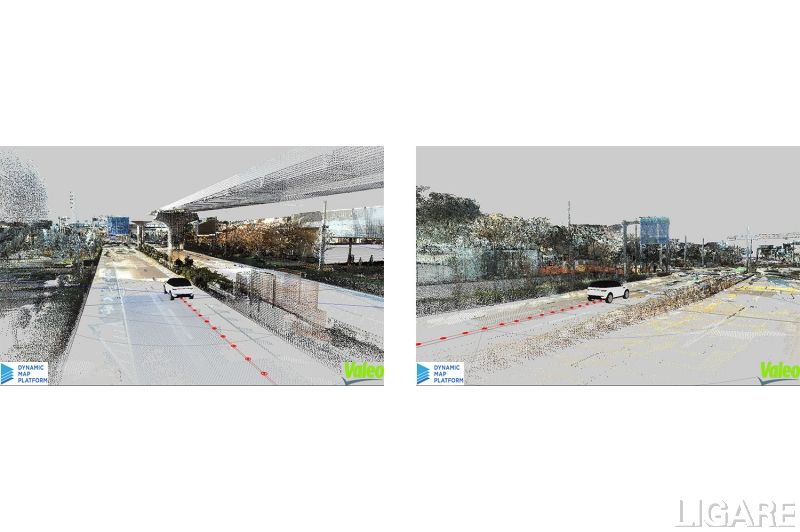
協業イメージ
フランスに本拠を置くメガサプライヤーのヴァレオと、高精度3次元地図データ(HDマップ)の大手プロバイダーであるダイナミックマップ基盤株式会社(以下、DMP)は、 自動運転システムの開発を促進するため、正確な自車位置推定とHDマップ更新のためのテクノロジーとビジネスモデルを共同で開発するパートナーシップに合意した。
車両が周辺環境を認識し、自車位置を正確に特定することは、ADAS(先進運転支援システム)と自動運転車の開発における主要課題の一つとなっている。また、インフラや道路環境の変化に対応する上で、自動運転車が使用するHDマップの定期的な更新も、リソースと時間が必要な課題だ。
ヴ...










