
自動運転車は安全に右折が可能か 神戸市で自動運転・路車間通信の実証開始
会員限定記事
2020/3/18(水)
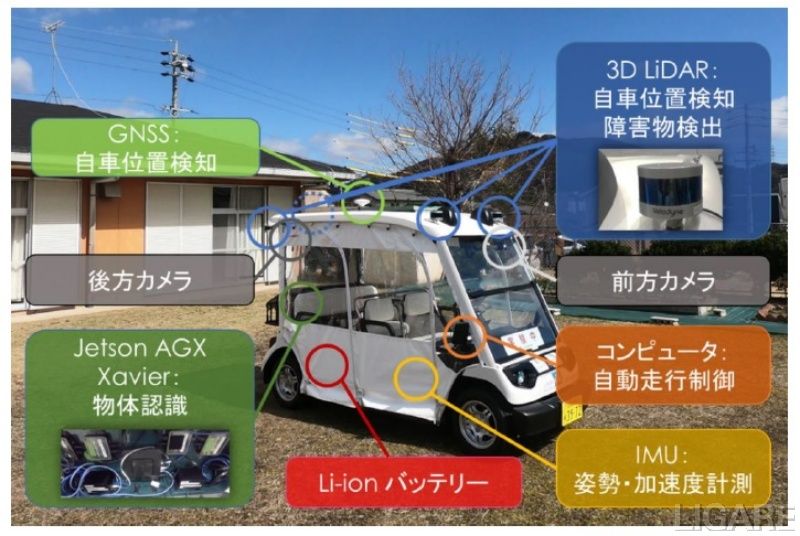
写真: 名古屋大学 (日本総研のプレスリリースより)
株式会社日本総合研究所(以下、日本総研)が主催する、まちなか自動移動サービス事業構想コンソーシアムは、3月16日から25日まで神戸市北区筑紫が丘において自動運転車両を用いた路車間通信の実証実験を実施すると発表した。今回の実証は、条件の異なる交差点(十字路とT字路)において自動運転車両が右折するケースで行う。右折の際に対向車線の通過車両や歩行者等の情報を道路側のセンサーによって取得し、自動運転車両が状況に応じた安全な挙動をとれるかなどを検証する。
まちなか自動移動サービス事業構想コンソーシアムは、2018年に日本総研が設立。持続可能なラスト&ファーストマイルの移動サービスの事業化を目指し...









自動運転特集
