
市街地用無人移動システムに求められる技術と可能性 LIGARE ビジネスセミナー
会員限定記事
2017/11/16(木)
障害物を回避する技術
車線維持制御ができれば、出発点から目的地まで経路を地図通り走ることができます。しかし、障害物などが出てきた場合、それを回避しなければなりません。障害物回避制御は主に2つの方法があります。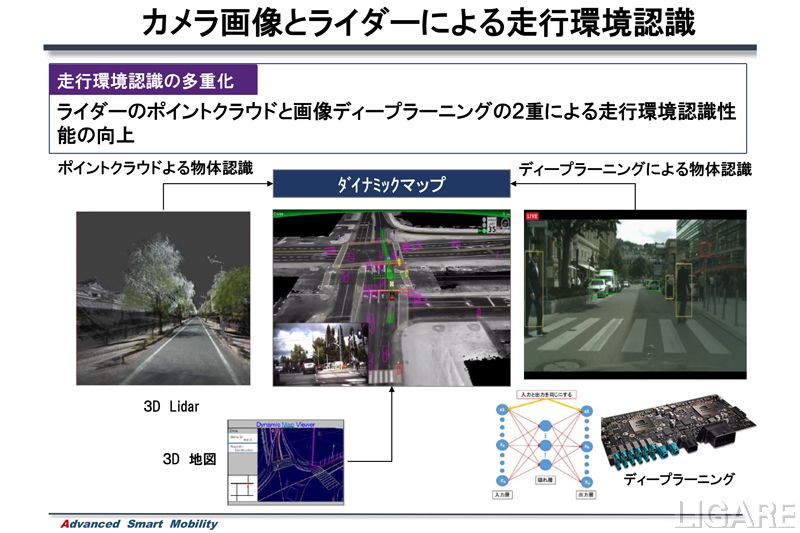
カメラ、LIDAR、ダイナミックマップを用いた走行環境認識の様子
1つは、LIDARとGPSと3次元地図を使ったローカルダイナミックマップという方法です。
LIDARとGPSにより周辺環境を認識し、進行方向のパスの障害物を...


関連記事:



get_the_ID : 2132
has_post_thumbnail(get_the_ID()) : 1
has_post_thumbnail(get_the_ID()) : 1



自動運転特集
