
パナソニック、ロボットの効率的な走行経路を計画できる技術開発
会員限定記事
2023/6/5(月)
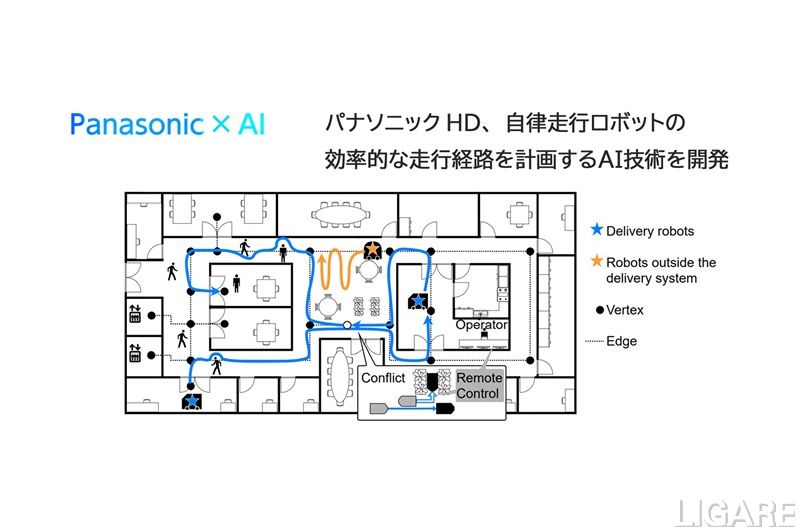
ビル内ロボット配送における
課題設定の概要
パナソニック ホールディングス株式会社(以下、パナソニックHD)は、人やほかのロボットが共存する環境下でもロボットの効率的な走行経路を計画できる技術を開発した。
自律走行ロボットが移動障害物を回避する際に減速や一時停止を繰り返すと、ロボットが通路を通過するのにかかる時間に、確率的に変動する遅延が発生する。この遅延の確率分布が事前に分かっていることは少なく、実際は不明、あるいは限られた事前情報しか得られない場合が多い。そのため、ロボットの走行中に観測された遅延を下に次の計画を作成することになる。
同技術では、ロボットが特定の経路を走行する際の遅延をパラメータが未知なガンマ分布に従うも...










