TRUST SMITH、複数AGVを同時に動かす群制御システム開発
会員限定記事
2021/8/3(火)

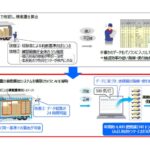
TRUST SMITH株式会社(以下、TRUST SMITH)は、複数のAGV(自動搬送ロボット)を同時に動かす群制御システムを開発した。7月30日付のプレスリリースで明かしている。
近年、製造・物流現場における人員不足が深刻な問題となっている。この課題を解決すべく、製造・物流現場にもDXの普及が徐々に広まりつつある。TRUST SMITHでは、これまでリフト式AGVのハードウェアの開発を行い、製造・物流現場の課題解決に貢献してきた。今回開発したのは、複数台のリフト式AGVを同時に動かす「群制御」のソフトウェアだ。この技術により、製造・物流現場における人手不足の解消、運搬業務の効率化...