三菱重工、下野市で自動運転バスの「路車協調システム」実証に参画 単眼カメラとAIで死角を検知・支援
会員限定記事
2025/12/22(月)
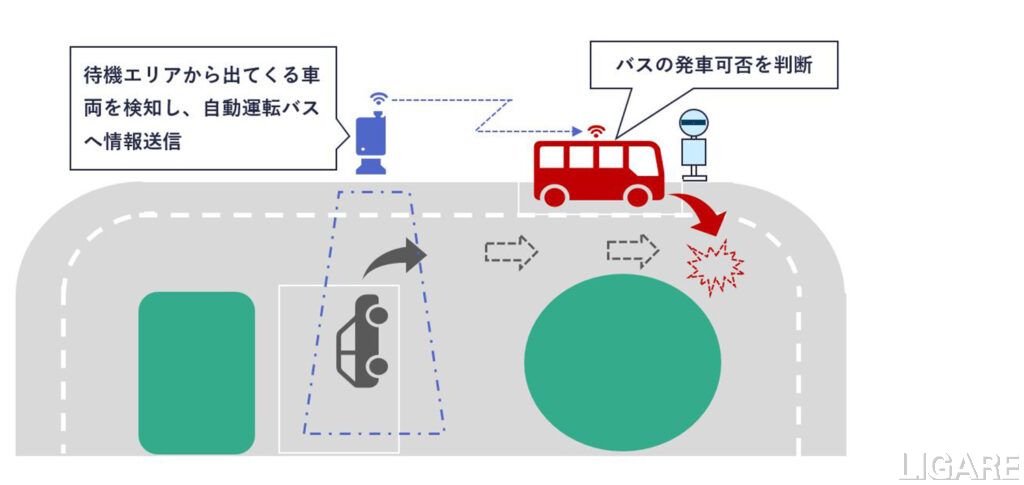
路車協調システムによる自動運転バス発車支援のイメージ
三菱重工業株式会社(以下、三菱重工)は2025年12月18日、栃木県下野市のバス路線「自治医大線」にて実施される自動運転バスの実証実験において、路車協調システムを提供・検証すると発表した。本実証は国土交通省関東地方整備局が主体となり、下野市や交通事業者と連携して行われるもので、三菱重工はシステムの設置およびデータ収集を担当する。期間は2025年12月15日から2026年2月末までの約2.5ヵ月間を予定している。
栃木県では無人自動運転移動サービスの普及に向けた取り組みが進められており、今年度、下野市では自動運転レベル4での実証運行を目指している。今回の実験は、この自動運転バスに対し、...