
Autonomous Vehicles and ADAS Japan 2016 汎用から専用へ パイオニア
会員限定記事
2017/6/29(木)
パイオニア株式会社(以下パイオニア)からは、自動運転開発事業部の畑野一良氏が『自動運転の実現へ、パイオニアが果たす役割』をテーマに登壇しました。
高度化地図“データエコシステム”
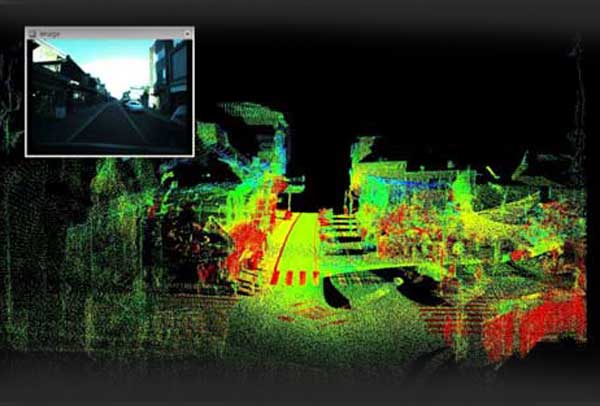
2020年頃までに高速道路・専用道路での自動運転の実用化、2025年頃までに一般道路も含めた自動運転の実用化、という2ステップで自動運転技術が進むと言われています。その中で、パイオニアが取り組むのは2ステップ目の一般道路も含めた自動運転で、この段階ではさまざまな周辺環境への適用が不可欠になります。そのために3D-LiDARや高精度地図をどのように使い、またどこを標準化・共通化していくべきか、というこ...










