
清水建設、技研で自動運転の実証実験 安全な走行を施設側からサポート
会員限定記事
2018/11/5(月)
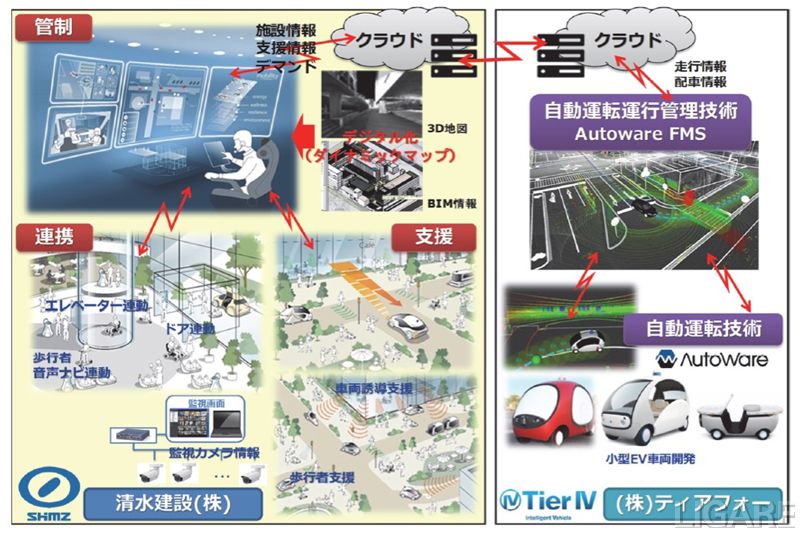
車両・施設の連携技術の概要
清水建設株式会社(以下、清水建設)は、完全自動運転技術を導入した施設・街区内移動システムの構築を目指し、東京都江東区にある自社の技術研究所内に、自動運転車両の安全かつスムーズな走行を施設側からサポートする管制・監視システムを構築、自動運転技術等を開発するベンチャー企業の株式会社ティアフォー*1(以下、ティアフォー)の技術協力の下、システムの実効性を検証する実証実験に着手した。
*1:完全自動運転のプラットフォーム事業やサービス事業を行う名古屋大学発のベンチャー企業。自動運転ソフトウエア「Autoware」を使った完全自動運転システムの開発を目的に、2015年12月創業。
自動運...









