
JR東日本とKDDI、都市データに連動したロボットの検証開始
会員限定記事
2023/1/11(水)
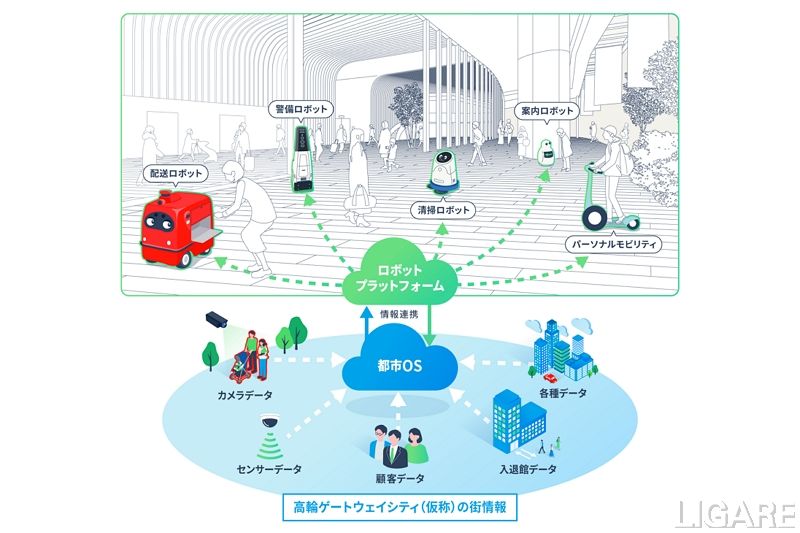
都市OSとロボットプラットフォームの
連携イメージ
東日本旅客鉄道株式会社(JR東日本)とKDDI株式会社は、防犯カメラの映像データをAI分析し、配送ロボットが自動で混雑回避や回遊販売を行うフードデリバリーサービスの実証実験を1月11日から開始する。1月10日付のプレスリリースで明かした。
同実証は、「高輪ゲートウェイシティ(仮称)」のまちづくりをコアとして、場所や時間にとらわれない働き方・くらし方を創出する「空間自在プロジェクト」の一環だ。ビルに設置している防犯カメラなど、都市や街の設備が持つデータを収集・分析するデータ連動基盤(以下、都市OS)と、ロボットの位置情報管理や走行の制御、および設備との連携を行うロボットプラットフォーム...










